du simulateur LEVTEAU
Introduction
L'expérience COROT est embarquée à bord de la plateforme PROTEUS. Il s'agit d'une plateforme multimission développée par le CNES pour des satellites de 300 à 500 kg, portant des charges utiles allant jusqu'à 250 kg, et adaptée aux orbites circulaires de 450 à 1 500 km d'altitude.

Lorsque l'expérience COROT sera réalisée, il faudra, avant de l'intégrer sur la plate-forme PROTEUS, tester ses interfaces. Or, il existera bien un simulateur de plate-forme, mais qui ne sera pas forcément disponible au moment voulu pour nos besoins.
De plus, certains tests de sous-systèmes nécessiteront certains types d'interface de PROTEUS : en particulier, des interfaces de type CS16 (Control Serial), AS16 (Acquisition Serial), LLC (Low Level Command), HLC (High Level Command), DBLA (Digital BiLevel Acquisition), DRA (Digital Relay Acquisition) et bus MIL-1553 seront nécessaires aux tests du DPU (Data Processing Unit) , du BCC (Bloc Controle Caméra), et du BEX (Bloc EXtracteur).
Il nous faut donc développer un simulateur de plate-forme, et donc, de mettre en oeuvre les bus de communication qu'il comporte munis des interfaces physiques de la vraie plate-forme.
Une étude préliminaire concernant le lien CS16 a été réalisée en 1999 par 3 étudiants de l'IUT de Cachan : Marc Balu, Cédric Bara et Sylvain Bergé.
Le simulateur
Ce simulateur hardware est piloté au moyen d'une ligne série 3 fils (RX ,TX et GND) à 115 Kbauds par une application Borland C++ Builder 5, sur PC Windows 2K. Suivant le niveau de synchronisme requis, il est possible, soit d'envoyer les commandes au rack en se synchronisant sur son 8Hz monitoré en permanence par le PC, soit de télécharger un batch de commande vers le rack et de déclencher son exécution locale au rack : on a alors une application "stand-alone".
On voit ici l'interface utilisateur provisoire utilisée pour le développement de ces interfaces :

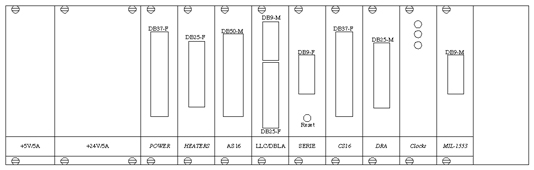
Dans un premier temps, le simulateur est destiné à piloter une moitié d'instrument sachant qu'il "suffira" de doubler le système pour en piloter l'intégralité. Le simulateur se présente sous la forme d'un rack 3U 84E de type KM6-II qui comporte :
 |
|
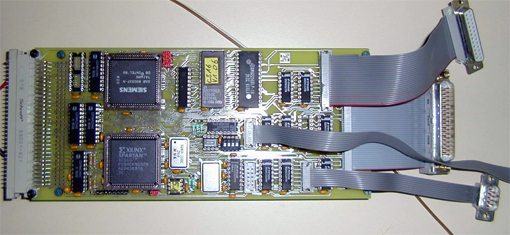
La carte PROTEUS-4 munie de ses connecteurs pour les AS16, les DBLA , les LLC et le port série. On peut voir, à gauche, le fond de panier qui permet d'étendre le pilotage à d'autres carte (DRA, CS16, synchros, etc...). Les 2 "pavés" sont : un microcontrôleur Siemens 80C537 et un FPGA Xilinx SPARTAN XCS10. |
permettant de piloter 10
LLC, 8 AS16, et 5 DBLA sur une connectique conforme au document de
spécification de la plate-forme PROTEUS,
équipée du processeur de contrôle du rack : un
SAB 80C537
Les lignes en entrée au standard SBDL sont
équipées de DS26C32 tandis que les sorties sont
équipées de DS36C31
La carte sti-AS16
Cette carte est destinée à mettre au point la carte PROTEUS-4. En effet, le DPU n'étant pas encore disponible, il m'a fallu concevoir un émulateur de DPU limité aux lignes AS16.
 |
 |
|
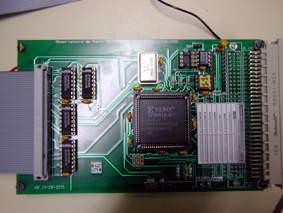
La carte sti-AS16, munie de ses drivers SBDL DS26C31 et DS26C32 à gauche et du FPGA SPARTAN de Xilinx qui intègre les fonctionalités d'émulation du DPU. |
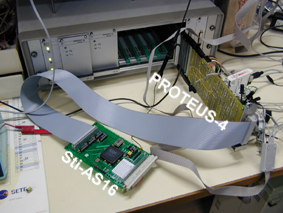
La carte sti-AS16 en configuration de tests avec la carte PROTEUS-4 (sur carte rallonge), face au rack. |
Ce simulateur de DPU, appelé "STI-AS16" (pour stimuli AS16) renvoie des mots de 16 bits, simulant les données d'écartométrie, sur ses lignes de data AS16, en parfait synchronisme avec les lignes clock et enveloppe générées par la carte PROTEUS-4. On trouvera son schéma ici.
La carte CK-PROT
Cette carte de génération des signaux d'horloge DPU et BS2 inclut aussi des DRA (Digital Relay Acquisition). Elle est destinée à piloter les horloges du DPU lors de sa recette (8Hz et 1/32S) ainsi que de simuler les interfaces de PROTEUS à destination du BS2 lors de sa recette et de son intégration.
La carte CS16 / HLC
Documentation technique
On trouvera ici le schéma de la carte PROTEUS-4.
On trouvera ici une implémentation des liens AS16 dans un FPGA Xilinx (Source VHDL). Il s'agit d'un composant capable de gérer 8 ensembles de DATA-CLK-ENV de façon simultanée ou indépendante.
Les différents liens
"Commande Série 16 bits" : il s'agit d'une télécommande au standard SBDL (Standard Balance Link). Le mot de 16 bits est envoyé en série, simultanément à une horloge bit et une enveloppe.

"Acquisition Série 16 bits" : il s'agit d'une télémesure au standard SBDL. Le mot de 16 bits est reçu en série, simultanément à une horloge bit et une enveloppe générés par le récepteur.
"Low Level Command" : il s'agit d'une impulsion active niveau haut de durée 26mS ± 2mS, au standard SBDL. C'est un type de télécommande générée par exemple pour les signaux de synchro 1Hz, 1/32Hz, ou le reset du DPU.
"High Level Command" : il s'agit d'une impulsion active niveau haut de durée 26mS ± 2mS, d'amplitude 28V
"Digital Bi Level Acquisition" : c'est une télémesure d'un signal actif niveau haut au standard SBDL.
"Digital Relay Acquisition" : c'est une télémesure d'un signal actif niveau haut.
Régis Schmidt, COROT-ETC, Mars 2003